本文檔說明如何使用電子凸輪型驅動器中的自動追剪曲線生成功能。
1>相關參數
Pn[759]:曲線生成控制
往Pn[759]寫3 觸發(fā)追剪曲線生成,完成后自動清零
Pn[760]:曲線生成狀態(tài)
反映曲線生成的狀態(tài),觸發(fā)生成后變?yōu)?/span>1,成功則自動清零,如果設定參數不正確
不能生成曲線,則保持為1
Pn[762]‐Pn[763]:同步速度
設定飛剪同步時的同步速度,即每一度凸輪相位對應的從軸運行脈沖數,單位為
pulse/度,浮點型
Pn[764]‐Pn[765]:返回速度
設定飛剪同步時的返回速度,即每一度凸輪相位對應的從軸運行脈沖數,單位為
pulse/度,浮點型
Pn[766]‐Pn[767]:同步開始相位
設定飛剪同步同步開始的相位,單位為0.01 度,范圍為(0‐36000)
Pn[768]‐Pn[769]:同步結束相位
設定飛剪同步同步結束的相位,單位為0.01 度,范圍為(0‐36000)
Pn[770]‐Pn[771]:等待相位寬度
設定飛剪完成后等待區(qū)的寬度,單位為0.01 度,范圍為(0‐36000)
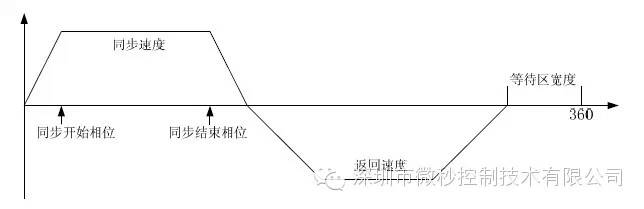
2>指令應用示意
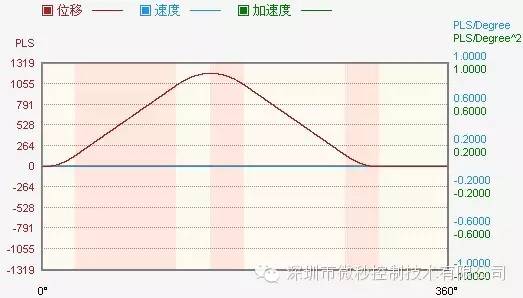
追剪的運行速度曲線如下:
觸發(fā)生成時,驅動器根據用戶設定的參數自動生成凸輪曲線,成功則Pn[759]和Pn[760]
自動清零,如果參數設定錯誤,Pn[760]保持為1。
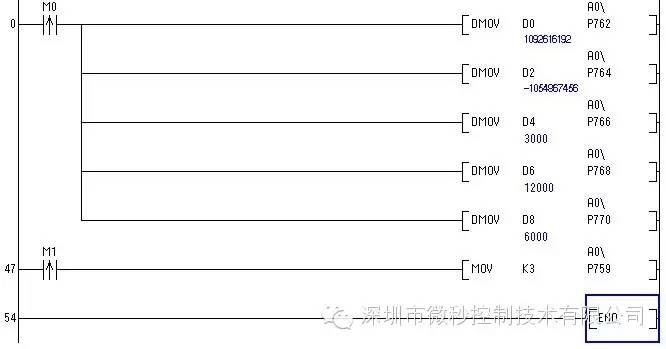
3>使用示例
下例中,在D0‐D1 中保存同步速度(浮點),D2‐D3 中保存返回速度(浮點),D4‐D5 中保存
同步開始相位(INT32),D6‐D7 中保存同步結束相位(INT32),D8‐D9 中保存等待區(qū)寬度(INT32),
最后往Pn[759]寫3 觸發(fā)曲線生成:
生成的曲線可以在后臺中讀取確認: